|
|

楼主 |
发表于 2009-3-16 08:49:58
|
显示全部楼层
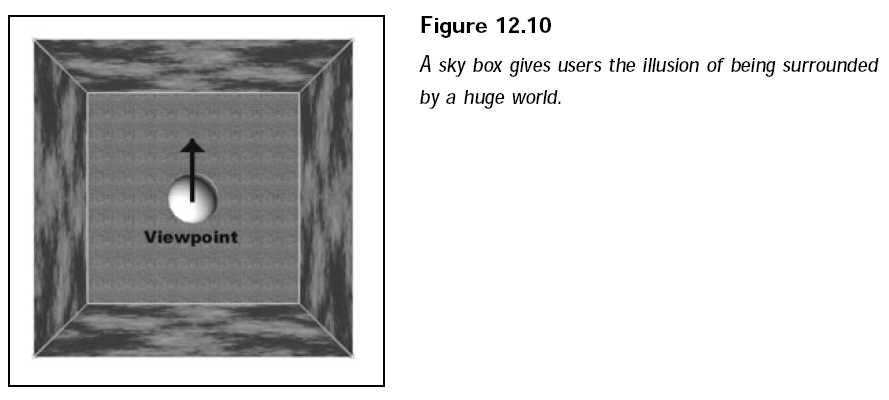
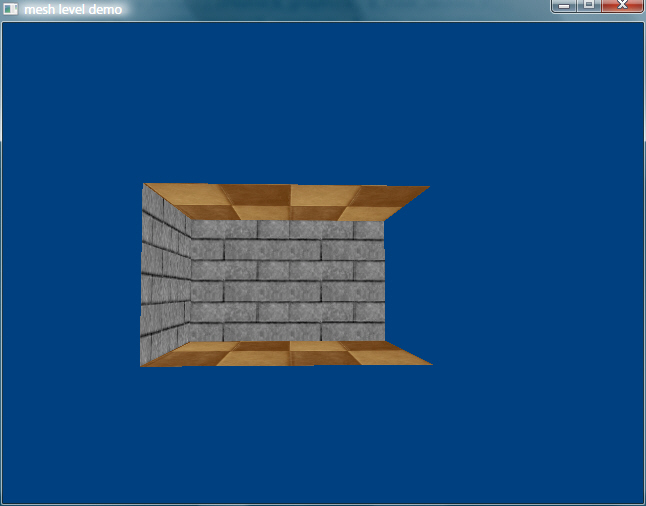
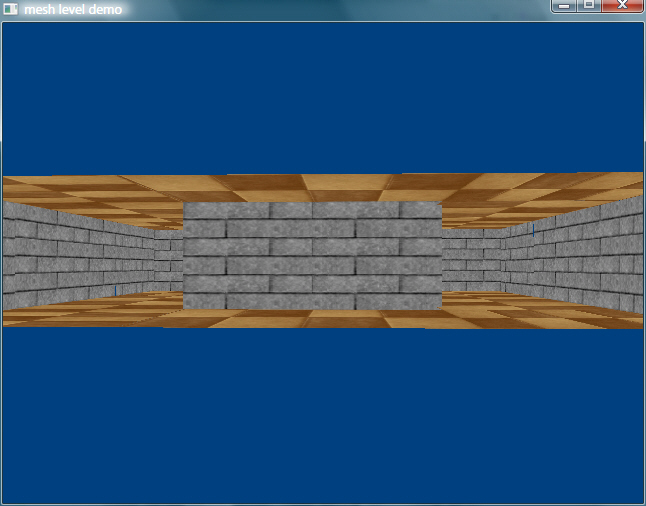
天框(sky box)是一种围绕观察者进行纹理映射的三维立方体的图形技术,渲染一个天框时,观察点总是定于中心位置,以便用户始终能够看到方框内部纹理映射的表面,这种技术能够制造出一种世界围绕用户的效果,如下图所示:
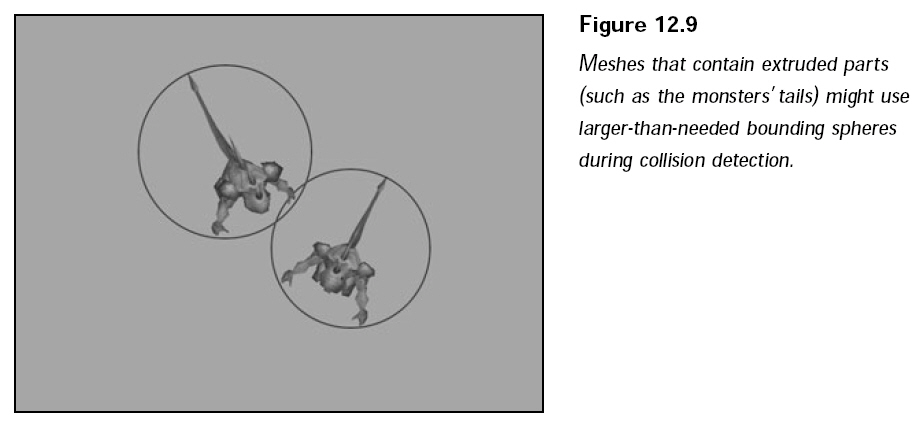
天框是非常容易是实现,只需一个立方体网格模型(其表面朝向里面)即可,通过一个顶点缓冲区存储立方体网格模型会非常不错。至于纹理,可以使用多达6个的纹理,每个表面一个纹理。网格模型并不需要很大,仅20.0单元大小的立方体就行了。纹理大小应该为256 x 256或者更高,较小的纹理将出现拉伸而且不生动。
创建一个天框类
SKY_BOX负责控制天框的每个方面,从创建渲染盒子所使用的顶点缓冲区,到渲染时所使用的纹理。
定义:
Code highlighting produced by Actipro CodeHighlighter (freeware)
http://www.CodeHighlighter.com/
-->enum SKY_BOX_SIDES { TOP = 0, BOTTOM, LEFT, RIGHT, FRONT, BACK };
//=====================================================================================
// This calss encapsulate how to make sky box.
//=====================================================================================
typedef class SKY_BOX
{
private:
typedef struct SKY_BOX_VERTEX
{
float x, y, z;
float u, v;
} *SKY_BOX_VERTEX_PTR;
#define SKY_BOX_FVF (D3DFVF_XYZ | D3DFVF_TEX1)
private:
GRAPHICS_PTR m_graphics; // parent GRAPHICS object
TEXTURE m_textures[6]; // face texture (0 - 5)
VERTEX_BUFFER m_vertex_buffer; // mesh vertex buffer
WORLD_POSITION m_pos; // sky box position
public:
SKY_BOX();
~SKY_BOX();
BOOL create(GRAPHICS_PTR graphics);
void free();
BOOL load_texture(short side, pcstr filename, D3DCOLOR transparent = 0, D3DFORMAT format = D3DFMT_UNKNOWN);
void rotate(float x_rot, float y_rot, float z_rot);
void rotate_rel(float x_rot, float y_rot, float z_rot);
BOOL render(CAMERA_PTR camera, BOOL alpha_blend = FALSE);
} *SKY_BOX_PTR;
实现:
Code highlighting produced by Actipro CodeHighlighter (freeware)
http://www.CodeHighlighter.com/
-->//----------------------------------------------------------------------------------
// Constructor, initialize member data.
//----------------------------------------------------------------------------------
SKY_BOX::SKY_BOX()
{
m_graphics = NULL;
}
//----------------------------------------------------------------------------------
// Destructor, release allocated resource.
//----------------------------------------------------------------------------------
SKY_BOX::~SKY_BOX()
{
free();
}
//----------------------------------------------------------------------------------
// Release allocated resource.
//----------------------------------------------------------------------------------
void SKY_BOX::free()
{
m_graphics = NULL;
for(short i = 0; i < 6; i++)
m_textures.free();
m_vertex_buffer.free();
}
//----------------------------------------------------------------------------------
// Create a sky box class object.
//----------------------------------------------------------------------------------
BOOL SKY_BOX::create(GRAPHICS_PTR graphics)
{
SKY_BOX_VERTEX verts[24] = {
{ -10.0f, 10.0f, -10.0f, 0.0f, 0.0f }, // Top
{ 10.0f, 10.0f, -10.0f, 1.0f, 0.0f },
{ -10.0f, 10.0f, 10.0f, 0.0f, 1.0f },
{ 10.0f, 10.0f, 10.0f, 1.0f, 1.0f },
{ -10.0f, -10.0f, 10.0f, 0.0f, 0.0f }, // Bottom
{ 10.0f, -10.0f, 10.0f, 1.0f, 0.0f },
{ -10.0f, -10.0f, -10.0f, 0.0f, 1.0f },
{ 10.0f, -10.0f, -10.0f, 1.0f, 1.0f },
{ -10.0f, 10.0f, -10.0f, 0.0f, 0.0f }, // Left
{ -10.0f, 10.0f, 10.0f, 1.0f, 0.0f },
{ -10.0f, -10.0f, -10.0f, 0.0f, 1.0f },
{ -10.0f, -10.0f, 10.0f, 1.0f, 1.0f },
{ 10.0f, 10.0f, 10.0f, 0.0f, 0.0f }, // Right
{ 10.0f, 10.0f, -10.0f, 1.0f, 0.0f },
{ 10.0f, -10.0f, 10.0f, 0.0f, 1.0f },
{ 10.0f, -10.0f, -10.0f, 1.0f, 1.0f },
{ -10.0f, 10.0f, 10.0f, 0.0f, 0.0f }, // Front
{ 10.0f, 10.0f, 10.0f, 1.0f, 0.0f },
{ -10.0f, -10.0f, 10.0f, 0.0f, 1.0f },
{ 10.0f, -10.0f, 10.0f, 1.0f, 1.0f },
{ 10.0f, 10.0f, -10.0f, 0.0f, 0.0f }, // Back
{ -10.0f, 10.0f, -10.0f, 1.0f, 0.0f },
{ 10.0f, -10.0f, -10.0f, 0.0f, 1.0f },
{ -10.0f, -10.0f, -10.0f, 1.0f, 1.0f },
};
free(); // free a prior sky box
// error checking
if((m_graphics = graphics) == NULL)
return FALSE;
// create the vertex buffer (and copy over sky box vertices)
if(m_vertex_buffer.create(m_graphics, 24, sizeof(SKY_BOX_VERTEX), SKY_BOX_FVF))
m_vertex_buffer.set(0, 24, (void*)verts);
// rotate the sky box into default orientation
rotate(0.0f, 0.0f, 0.0f);
return TRUE;
}
|
|




 IP卡
IP卡 狗仔卡
狗仔卡 发表于 2009-3-16 08:42:01
发表于 2009-3-16 08:42:01
 提升卡
提升卡 置顶卡
置顶卡 沉默卡
沉默卡 喧嚣卡
喧嚣卡 变色卡
变色卡 千斤顶
千斤顶 显身卡
显身卡

 OLYGON_INFO structure maintains a material group index,
OLYGON_INFO structure maintains a material group index,